С появлением двигателей постоянного тока, и началом применения их в качестве тяговых, появились и аппараты управления. В 70-80 годах 19 века, немецкие и французские фирмы начали широко применять электромеханические контроллеры для управления машинами постоянного тока. Конструкции контроллеров были достаточно просты с точки зрения и производства, и эксплуатации. Они легко ремонтировались без специального оборудования на местах установки. Это немаловажное преимущество позволило дожить данным конструкциям до наших дней. В СССР и СЭВ одним из немногих предприятий, выпускающих аппаратуру для рудничных электровозов, был харьковский завод «Электромашина». На заводе в 70-х годах прошлого века для электровозов со сцепной массой 10 тонн и выше был разработан контроллер КС-303 - для управления двигателями типа ЭТ-31 и ЭТ-36, с последовательным возбуждением и номинальными токами 142А и 204А соответственно. Основой КС-303 был контактор (кулачковый элемент), такой же, как и на контроллерах КВС-201 и ГР-9, выпускавшихся с 60-х годов прошлого века. Эти контроллеры были рассчитаны на коммутируемые токи 100А и 130 А. Сложно сказать, была ли проведена в контакторах КС-303 модернизация токоведущих частей и узла дугогашения, но внешне контакторы остались такими же. ( см. Сахаров Б.П.«Проектирование электрических аппаратов», М., «Энергия» 1971 г.). На КС-303 переключение направления вращения двигателей осуществляется с помощью реверсивного вала с набором токопроводящих сегментов и рейки, на которой закреплены гибкие контактные пальцы. При коммутации, медный сегмент, в виде пластины, замыкает промежуток между контактами пальцев. Т.к. пальцы коммутируют ток, протекающий через полюсные катушки двигателей, этот контактный узел должен быть рассчитан на прохождение 142А и 204А. Судя по внешнему виду, он также остался без изменений, по сравнению с предыдущими контроллерами. В середине 80-х годов прошлого века контроллер КС-303, без внесения в конструкцию особых изменений, превратился в КС-304М, который унаследовал почти все слабые места 303-го. Срок эксплуатации контроллера КС-304М, особенно на электровозах типа К-14 с двумя двигателями ДТН-45, оставляет желать лучшего и сегодня. После распада СССР на московском заводе «Динамо» создали новый контроллер, получивший название КС-305. Основой контроллера стали контакторы КЭ-46 и КЭ-47, применяемые на городском электротранспорте. Обладая определенными достоинствами, контроллер КС-305, тем не менее, не смог удовлетворить всем требованиям, предъявляемым к контроллеру шахтного электровоза. К его недостаткам можно отнести: - мощность двигателей, коммутируемая контакторами КЭ-46, КЭ-47 значительно больше мощности двигателей рудничных электровозов. Токи на рудничных электровозах ниже, чем расчетные для контакторов, поэтому дугогасительный узел контактора работает не в режиме, что приводит к преждевременному выходу контактора и дугогасительной камеры из строя; - вместо гибких пальцев, как на КС-304, установлены контакторы, за счет чего габариты и масса КС-305 в полтора раза больше, чем у КС-304. Это значительно увеличивает стоимость контроллера и ухудшает условия труда машиниста, т.к. кабина рудничного электровоза имеет небольшие размеры.
Анализируя вышеизложенное, разработчики ООО "Электрополюс" пришли к выводу о необходимости модернизации КС-304М. Были сформулированы и выполнены следующие задачи:
- увеличить коммутирующую способность и повысить ресурс при сохранении габаритных размеров; - добиться взаимозаменяемости запасных частей нового контроллера и КС-304М; - сохранить приемлемую для потребителя цену.
Реверсивный блок остался без принципиальных изменений, за исключением того, что сегмент имеет выемку для увеличения контактной площади ( фото 4), а для коммутации полюсных катушек гибкие пальцы сдвоены (фото 5). Это изменения дали возможность снизить нагрев токоведущих контуров при протекании номинального тока, а главное, тока перегрузки, когда оба двигателя работают в пусковом режиме.
На фото 6письмо ОАО "Александровский машиностроительный завод", подтверждающее использование контроллера КС-304У на электровозах К10 и К14 вместо контроллера КС-305.
/ООО "Электрополюс", отдел маркетинга. тел. +38(057)754-49-07/
Фото 1. (усиленный кулачковый элемент - справа)
Фото 2. (усиленный кулачковый элемент - справа)
Фото 3. (усиленный кулачковый элемент - слева)
Фото 4.
Фото 5.
Фото 6.
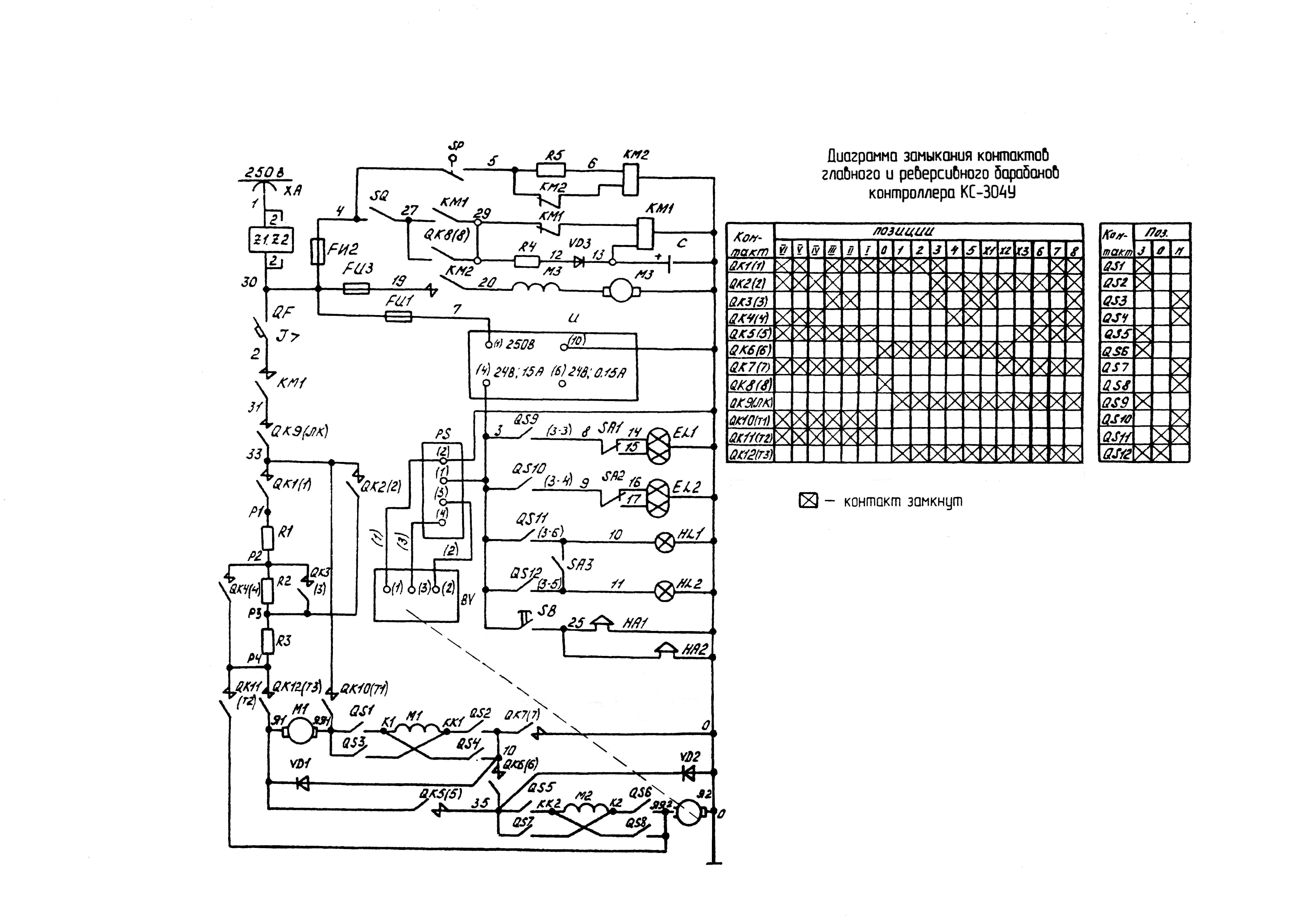
Рис.1 Схема электрическая принципиальная контактного рудничного электровоза 14КА украинского производства (контроллер КС-304У)
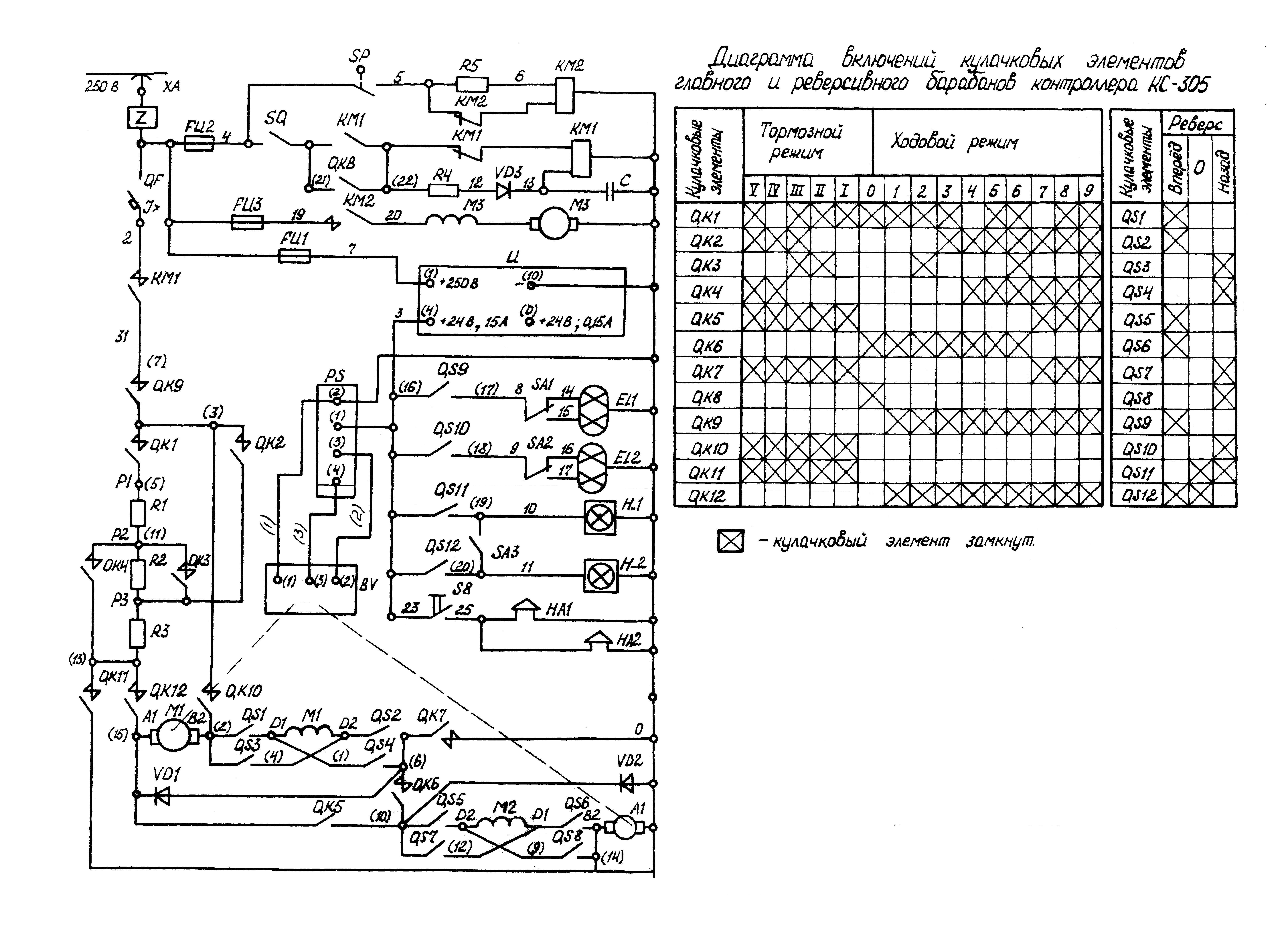
Рис.2 Схема электрическая принципиальная контактного рудничного электровоза К14 российского производства (контроллер КС-305)
Отличия в подключении силовых контроллеров КС-304У и КС-305
КС-304У
КС-305
Наименование позиций подключения
Кол-во (шт)
Позиции диаграммы замыкания
Кол-во (шт)
Позиции диаграммы замыкания
Ходовые позиции в том числе: последовательные параллельные переходные*
11
5 3 3
Х1; Х2; Х3
9
5 3 1
6
Тормозные позиции
6
5
*) для перехода от последовательного включения двигателей к параллельному
Эксперты Международного экономического рейтинга "Лига лучших" провели оценку деловой репутации нашего предприятия, и по результатам экспертизы нас номинировали на международную награду «ENTERPRISE OF THE YEAR - 2018»за безупречную деловую репутацию.